



Featured image credit: Roscosmos
Lift Off Time/Launch Window | August 10, 2023 – 23:10:57 UTC August 11, 2023 – 02:10:57 MSK |
|---|---|
Mission Name | Luna-25 |
Launch Provider | Roscosmos |
Customer | Roscosmos |
Rocket | Soyuz 2.1b with a Fregat-M upper stage |
Launch Location | Site 1S at the Vostochny Cosmodrome, in the Amur Oblast, Russia |
Payload mass | ~1,800 kg (~4,000 lb) |
Where is the spacecraft going? | To the Moon, where it will land |
Will they be attempting to recover the first stage? | No. This is not a capability of the Soyuz 2.1b rocket |
Where will the first stage land? | It will crash into Russian territory |
Will they be attempting to recover the fairings? | No. This is not a capability of the Soyuz 2.1b rocket |
Are these fairings new? | Yes |
How’s the weather looking? | N/A |
This will be the: | – 123rd orbital launch attempt in 2023 – 83rd launch of a Soyuz 2.1b rocket altogether – 3rd launch of a Soyuz 2.1b rocket in 2023 |
Where to watch | Official livestream |
What’s All This Means?
Russia’s Space Agency, Roscosmos, has prepared a Soyuz 2.1b rocket with an optional Fregat-M upper stage, in order to launch the Luna-25 lander. Both the launch vehicle and spacecraft are ready at Site 1S, in the Vostochny Cosmodrome, located in the Amur Oblast, Russia. The launcher will loft Luna-25 into space, and then its translunar injection (TLI) will take place. Following potential minor corrections, the lander will maneuver to place itself into an orbit around the Moon. Finally, after approximately 10 days, the spacecraft will attempt a soft touchdown onto our natural satellite’s surface.
What Is Luna-25?

After almost half a century, Russia is going back to the Moon by means of an uncrewed lander: Luna-25. Otherwise known as Luna-Glob, it is also reasonable to consider the project actually represents the first time Russia carries out a mission to our natural satellite. That is, the last one, Luna-24, took place in August, 1976, during the Soviet era.
Generally speaking, the spacecraft will demonstrate the capabilities needed to go to the Moon and land on it. By successfully doing so, and confirming Russia’s ability to get to the lunar surface, it ensures everything is set for continuing with the country’s lunar program. Additionally, this project includes the first studies performed close to the Moon’s South Pole. Specifically, Luna-25 will probe both the ground, and the selenic exosphere.
The choice of the landing site derives, in the first place, from analysis of orbital observations. Thanks to these, it was possible to determine where the lunar soil contains water ice. At the same time, the site had to present a landscape regular enough to allow for safely touching down. Accordingly, a location north of the Boguslawsky crater will serve as the main landing area, with a secondary one to the southwest of the Manzini crater.
Lunar Tasks For Luna-25
Water
The lander will study the Moon’s surface down to a depth of about 40 cm (~16 in). Using its instruments, it will look for water content, as well as attempt to determine which elements, and their isotopes, are present.
Radiation
A completely different objective will be to measure how radioactive the surface of the Moon usually is. In other words, both neutron and gamma-ray background radiation.

Exosphere
Our natural satellite’s exosphere begins essentially at ground level, and Luna-25 will study both its composition and the physical processes taking place in it. It is not only of interest how it changes between day and night, but also what happens when the Moon crosses Earth’s magnetosphere tail.
Instruments Onboard
All of the following instruments were developed by the Russian Space Research Institute, which is the leading institution within the Russian Academy of Sciences that is involved in space exploration.
Study Of Lunar Regolith
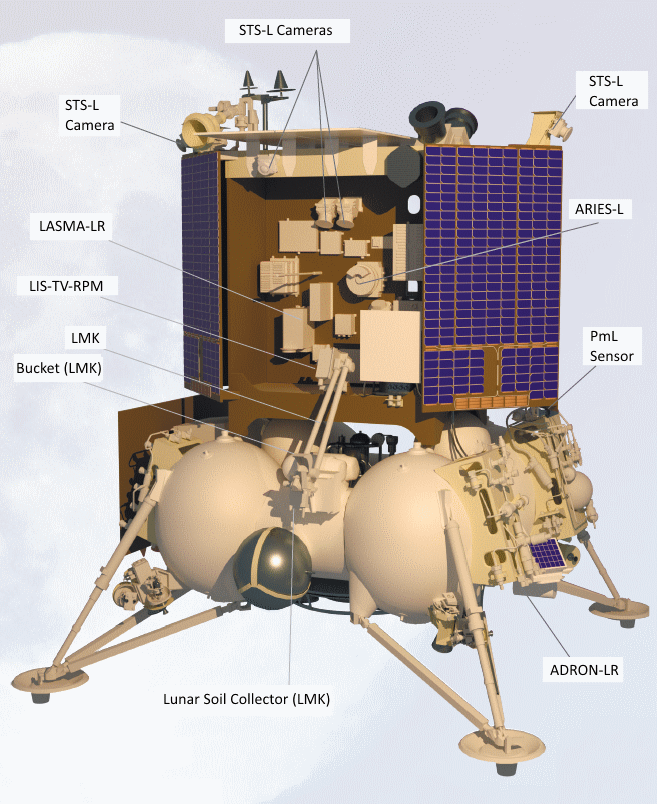
LASMA-LR
This is a laser mass analyzer, which gets regolith samples and then vaporizes them. After that, it is capable of detecting any element down to a presence of 0.005 %. This instrument will help in determining the composition of the lunar surface, including isotopes and water ice, as mentioned before. According to plans, it will analyze 11 samples taken from around the landing site.
LIS-TV-RPM
In order to determine which minerals are present in the selenic ground, the lunar infrared spectrometer will be a main actor. Mounted on the manipulator arm, its TV camera will enable positioning. The instrument will perform spectrometry using reflected light from the surface, both in the visible and the infrared spectra. Further, it will observe not only material on the surface, but also in ditches dug by Luna-25. Data obtained during this mission will be compared to that from other Moon missions.
ADRON-LR
This instrument is an active detector of neutron radiation, and its task will also involve the detection of elements and water ice on the surface. In this case, it will emit neutrons, interacting with the soil down to a depth of about 1 m (~3 ft). As a result, secondary neutrons and gamma-ray radiation will carry the information back to the sensor. This is a methodology known as neutron logging.
Study Of Both Regolith And Exosphere
ARIES-L
The panoramic ion energy-mass spectrometer basically focuses on the study of ions and neutral particles in the lunar exosphere. It will explore the interaction of the solar wind with the lunar surface, learning about processes in the exosphere, as well as about ground composition.
PmL
Particles from the ground present parameters such as charge, mass, and momentum. The dust monitor instrument will measure them, coupled with observation of their flow, and local electric field. As a result, this will enable the study of levitating particles on the Moon. In addition, it allows it to do research during different times of the lunar day, and different solar activity levels, focusing on the exosphere. This is an extremely rarefied atmosphere, comprising gas and plasma.


Auxiliary Equipment
LMK
Luna-25 is equipped with a scoop and a regolith sampling device, as well. This is the lunar manipulator complex, which will excavate the ground down to a 40 cm (~16 in) depth. During this activity, research of physical and mechanical properties of the ground will take place. The LMK will also feed the LASMA-LR instrument, and correctly position LIS-TV-RPM.
STS-L
Comprising eight cameras, the service television system will capture the surrounding area, or focus on performed tasks. Four wide-angled cameras will show panoramic views of the landscape. Another two cameras will be essential for LMK operation, imaging the working field. The last two are installed on a bracket where the engines are mounted. These will allow for imaging the surface during descent and landing.
BUNI
This is the scientific research control unit, supplying power to the different instruments onboard. Moreover, it will control them, and collect the data they generate. BUNI enables the storage of these data, together with telemetry information, as well as their transmission to other relevant systems.

Luna-25 Spacecraft
Developed by NPO Lavochkin, Luna-25 is designed in such a way that can be divided into two different sections. The top one is the instrument compartment, while the lower one comprises the propulsion system. In any case, this lander’s service life is one year. During this time, it will perform its scientific duties in daylight, while keeping in touch with Earth. Conversely, at night it will enter a dormant state, awaiting for the next sunrise.
Non-hermetic Instrument Compartment
A load-bearing structure gives shape to this compartment, where a panel hosting the instruments, and other items, can be found. Its design is open, non-hermetic, which allows for mass savings. Because of this, more scientific payloads could be present supporting the mission.
Other onboard systems will manage thermal and electrical needs for Luna-25. For instance, V-shaped solar panels comprise the sides of this compartment. On the other hand, radiators are on its “roof,” and in charge of cooling the lander.
Inside this compartment a series of components will keep the spacecraft alive during the 14.5-Earth-days long night on the Moon. Batteries store the electrical power, while a radioisotope thermoelectric generator (RTG) will continue to generate electricity. Simultaneously, a pair thermal blocks (TB) will be the heating source.
A group of antennae, both directional and non-directional, provide service and scientific communications with Earth. Star trackers, and a solar sensor inform Luna-25 where it is, as well as its pointing — or attitude. Cameras and a reflector panel complete the assortment of elements in this compartment.
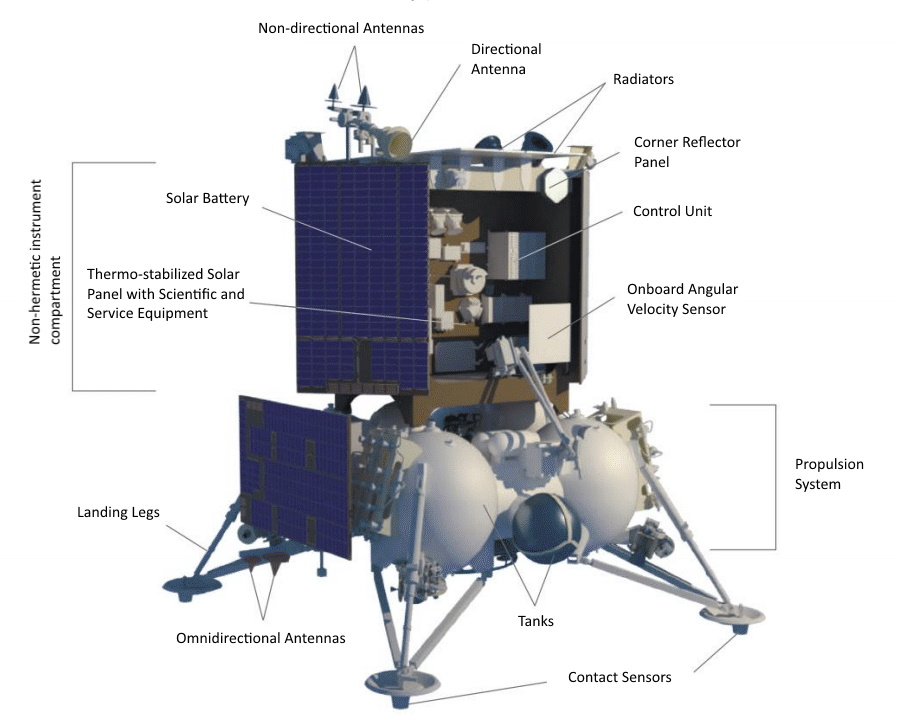
Propulsion System
Responsible for every maneuver the spacecraft performs, it comprises the propellant tanks, engines, smaller thrusters, as well as piping, and valves among other parts. In addition to that, four landing legs connect to each tank using three struts each. On each feet, a ground contact sensor deactivates the propulsion system once landing occurred.
In more detail, Luna-25’s propulsion system comprises two different, though interconnected subsystems. In the first place, one that performs trajectory corrections and braking. For this reason, a S5.154.100 fires with a thrust between ~3.9 kN (~880 lbf) and ~4.7 kN (~1,060 lbf). This subsystem also includes two 255U.487 engines with a thrust of ~0.6 kN (~132 lbf) each, used for soft lunar landing.
The remaining subsystem keeps the lander oriented and stabilized throughout the whole flight. For this purpose, four low-force S5.140 thrusters generate ~49 N (~11 lbf), achieving minor trajectory corrections, and attitude control. For the latter, another eight S5.145 thrusters produce ~5.9 N (~1.3 lbf) of thrust, each.

Path To Launching Luna-25
A summary is briefly presented highlighting some notable milestones leading to this launch:
- November 9, 2021: arrival of the Fregat-M upper stage for this launch at Vostochny Cosmodrome.
- December 13, 2022: successful acceptance test of the Doppler radar for measuring velocity and distance during approximation. This instrument, DISD-LR, had previously been a cause for delays.
- July 11, 2023: arrival of the Luna-25 spacecraft at Vostochny Cosmodrome.
- July 15, 2023: propellant loading of the Fregat-M upper stage.
- July 26, 2023: propellant loading of the Luna-25 spacecraft.
- August 1, 2023: assembly of Fregat-M and Luna-25.
- August 4, 2023: encapsulation of the assembly of Fregat-M and Luna-25.
- August 4, 2023: imminent stacking of rocket and payload assembly.
- August 8, 2023: fully stacked vehicle’s rollout to the pad.
Trajectory To The Moon
Once the rocket lifts off, a succession of events will take place. In the first place, side booster separation, followed by first stage separation, and fairing jettison. The next step is to separate the second stage, meaning that the Fregat-M alone continues carrying the spacecraft. After two burns, the upper stage will have left Luna-25 in a translunar injection trajectory. That is, a path that allows it to go from the Earth to the Moon.
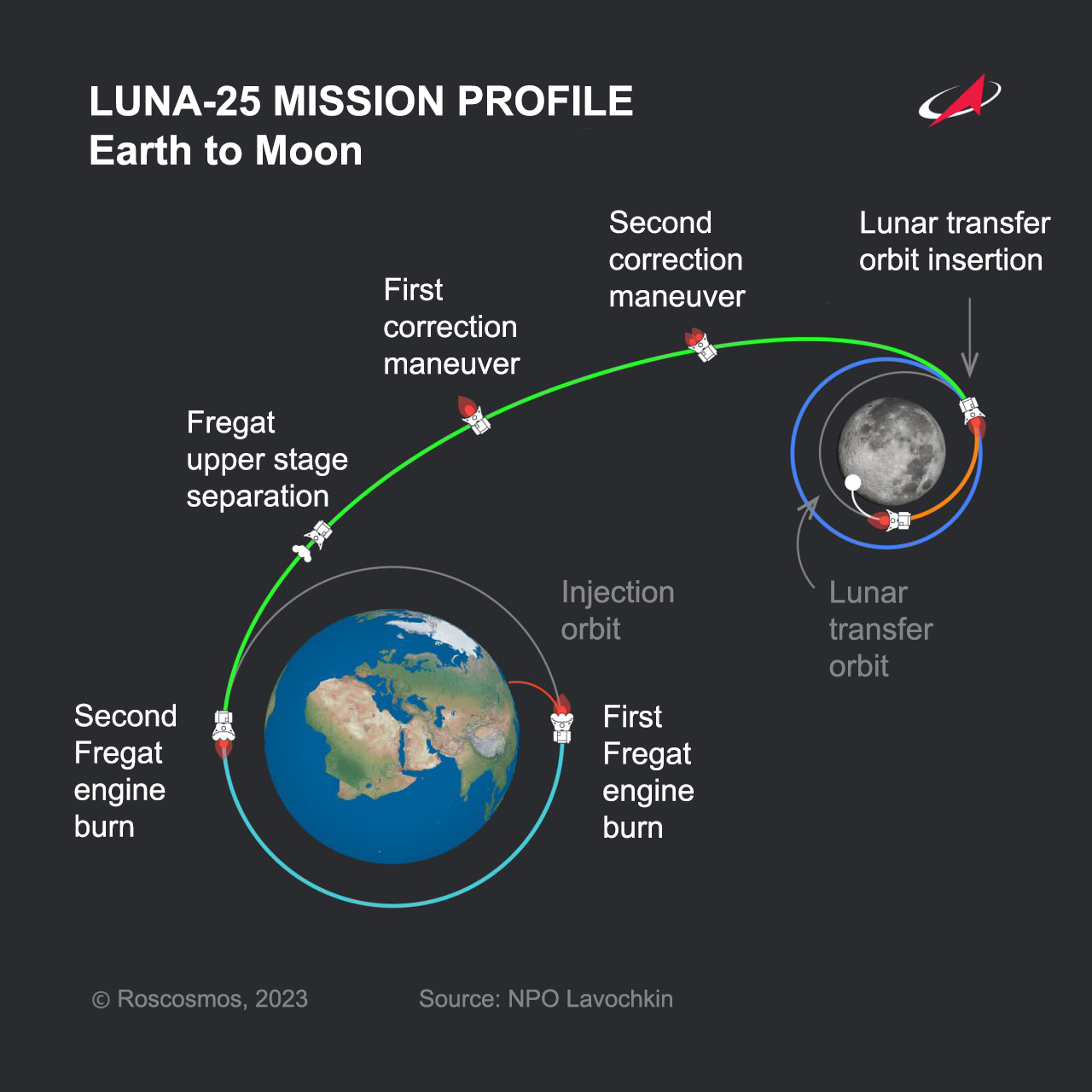

During its journey, two burns could occur, aiming at correcting any deviation from the intended trajectory. When the lander is close enough to our natural satellite, an orbit insertion burn takes place. The spacecraft will have to remain in orbit for about five days, studying and calculating a descent orbit. Then, a burn will decrease Luna-25’s orbit, bringing its lowest point — the perilune — from ~100 km (~62 mi) to ~18 km (~11 mi).
Finally, a second burn will deorbit the spacecraft, directing it toward the selected landing site. The engine will burn one more time, first generating high thrust, and then switching to low thrust. Like this, Luna-25 should be able to softly touch down onto the selenic surface.
What Is The Soyuz 2.1b?
ROSCOSMOS’s Soyuz is a multi-use medium-lift launch vehicle that was introduced in 1966 and since then has been the workhorse of the Soviet/Russian space program. It is capable to launch civilian and military satellites, as well as cargo and crewed missions to the ISS. Over the decades, several variants of the Soyuz rocket have been developed. Soyuz 2.1b is one of its latest iterations that belongs to the Soyuz-2 rocket family.
The rocket consists of three stages, all of them expendable. When launching to the ISS, Soyuz-2 can be flown with either a Progress capsule or a Soyuz spacecraft.
Soyuz 2.1b is about 46.3 meters (152 ft) in height and 2.95 meters (9 feet) in diameter. The vehicle’s total lift-off mass is approximately 312,000 kg (688,000 lb). The rocket’s payload lift capacity to low-Earth orbit (LEO) is between 6,600 and 7,400 kg depending on the launch site.
Stages
| First Stage | Second Stage | Third Stage | |
| Engine | 4 RD-107A | RD-108A | RD-0124 |
| Total Thrust | 840 kN (188,720 lbf), sea level 1,020 kN (229,290 lbf), vacuum | 792 kN (178,140 lbf), sea level 922 kN (207,240 lbf), vacuum | 294 kN (66,094 lbf), vacuum |
| Specific Impulse (ISP) | 263 s, sea level 320 s, vacuum | 258 s, sea level 321 s, vacuum | 359 s, vacuum |
Side Boosters
The first stage of the Soyuz 2.1b rocket is composed of 4 side boosters that are powered by RD-107A engines. Each one of the boosters has a conical shape and a dry weight of 3,784 kg. It is approximately 19.6 meters in length, with a diameter of 2.7 meters. Each side booster has two vernier thrusters that are used for flight control.
The RD-107A engine runs on rocket-grade kerosene (RP-1) and liquid oxygen (LOx). The propellants are stored in the pressurized aluminum alloy tanks, the kerosene tank is located in the cylindrical part of the booster, and the LOx one is in the conical section. Each one of those engines have 4 combustion chambers and together they are capable of producing a thrust of 840 kN at sea level and 1,020 kN in a vacuum.

Perhaps, the most spectacular moment of the Soyuz-2 rocket’s launch is the separation of the first stage. It happens approximately 2 minutes after the launch. The boosters perform a pattern, known as the “Korolev cross” (named after Sergei Korolev, a very important figure of the USSR space program and history).
Second And Third Stages
The center core stage is powered by a single RD-108A engine, and the upper stage is fitted with a single RD-0124 engine. Both of these engines run on RP-1 and LOx and have 4 combustion chambers. The second stage is 27.1 meters long, with a diameter of 2.95 meters, and a dry mass of 6,545 kg. It has 4 vernier thrusters for three-axis flight control.
The third stage of a Soyuz-2 rocket has a height of 6.7 meters, a diameter of 2.7 meters, and a dry mass of 2,355 kg. One interesting thing about the RD-0124 engine on this stage is that it starts its ignition sequence prior to stage separation. This process is called “hot fire staging”.

Fregat Upper Stage
Flight qualified in 2000, the Fregat upper stage is an autonomous and flexible stage that is designed to operate as an orbital vehicle. It extends the Soyuz launcher’s capability, covering a full range of orbits (LEO, SSO, MEO, GTO, GEO and Earth escape). Fregat is independent of all the other stages, as it has its own guidance, navigation, attitude control, tracking, and telemetry systems. The S5.92 engine burns storable propellants – UDMH (unsymmetrical dimethylhydrazine) and NTO (nitrogen tetroxide). The Fregat upper stage is encapsulated in a fairing with the payload and a payload adaptor/dispenser. Upgraded Fregat-M has additional ball-shaped compartments on top of its propellant tanks, which allows to increase the load capability of the propellant.
A cynical Russian propaganda exercise on the light of ‘adventures’ in Ukraine