



Featured image credit: ISRO
Liftoff Time | July 30, 2023 – 01:00 UTC | 06:30 IST |
|---|---|
Mission Name | DS-SAR |
Launch Provider | NewSpace India Limited (NSIL), the commercial branch of the Indian Space Research Organization (ISRO) |
Customer | The Singaporean Defence Science and Technology Agency (DSTA) together with ST Engineering, and others ridesharing in this mission |
Rocket | Polar Satellite Launch Vehicle, Core Alone, or PSLV-CA (PSLV-C56) |
Launch Location | First Launch Pad (FLP) located at the Satish Dhawan Space Centre, on the Sriharikota island, India |
Payload mass | >420 kg (~940 lb) |
Where are the satellites going? | A circular low-Earth orbit (LEO) at 535 km (~330 mi) in altitude and 5 degrees in inclination |
Will they be attempting to recover the first stage? | No. The PSLV rocket does not have this capability |
Where will the first stage land? | It will crash into the Bay of Bengal |
Will they be attempting to recover the fairings? | No. The PSLV rocket does not have this capability |
Are these fairings new? | Yes |
How’s the weather looking? | TBD |
This will be the: | – 114th orbital launch attempt in 2023 – 2nd PSLV mission in 2023 – 58th PSLV mission overall – 6th ISRO mission in 2023 – 90th ISRO mission overall |
Where to watch | Official livestream |
What’s All This Mean?
The 56th operational flight of the Polar Satellite Launch Vehicle or PSLV will place the DS-SAR satellite into a circular low-Earth orbit (LEO) at 535 km (~330 mi) in altitude and 5 degrees in inclination. Both the Defence Science and Technology Agency (DSTA) and the firm ST Engineering will be users of this spacecraft. The rocket will lift off from the First Launch Pad (FLP) in the Satish Dhawan Space Centre, Sriharikota, India. As part of this rideshare mission, there are another six small satellites flying atop the launcher, provided by NewSpace India Limited (NSIL) for the Indian Space Research Organization (ISRO). Notably, all of the seven payloads on this flight are Singaporean, including DS-SAR. After end of mission, the PS4 stage of the PSLV rocket will attempt lowering its orbit to a circular 300 km (~205 mi) using remaining propellants
What Is DS-SAR?
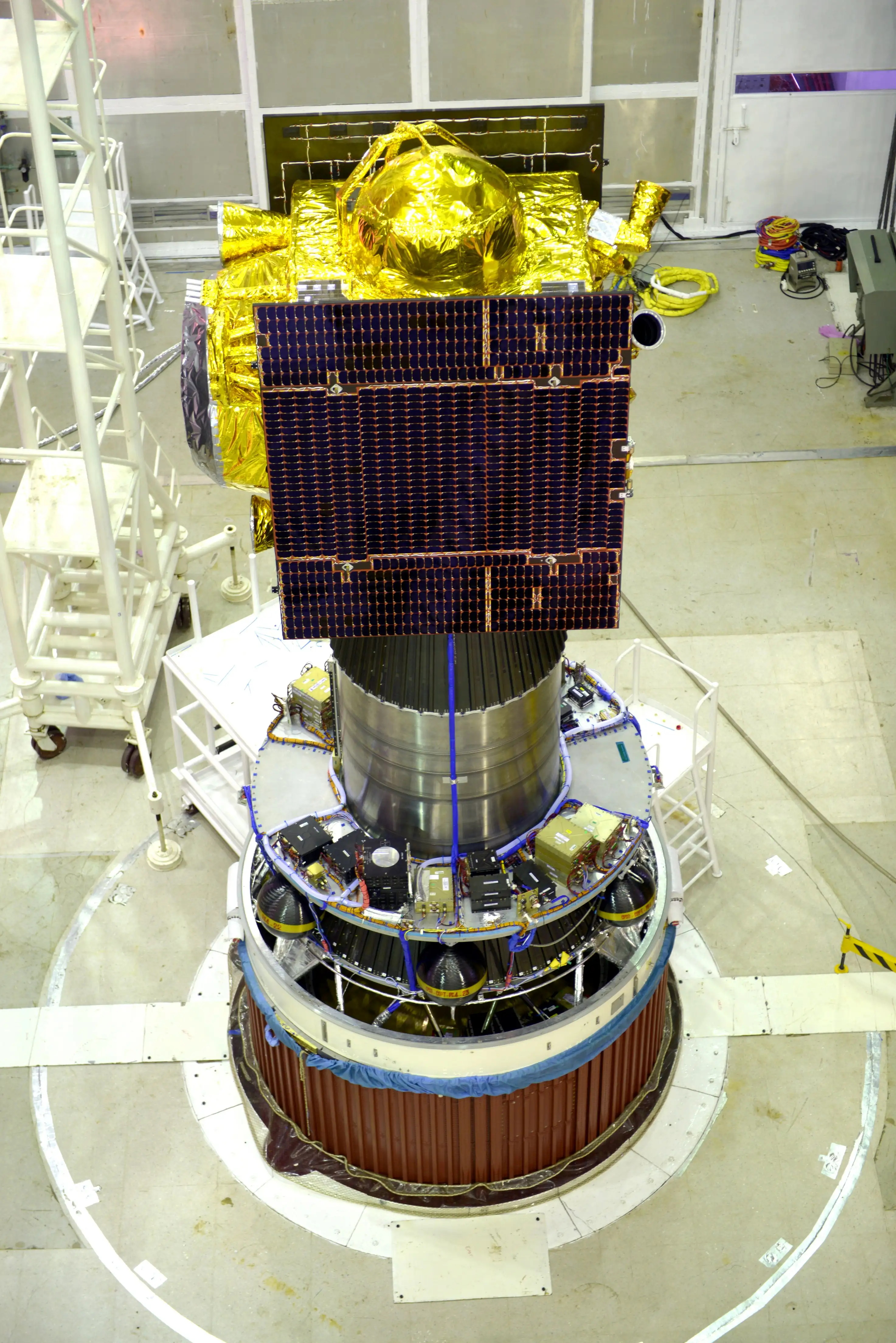
Israel Aerospace Industries (IAI) has been responsible for the development of the DS-SAR spacecraft, while the DSTA and ST Engineering, both Singaporean, will be its operators. Observing Earth’s surface from space, a number of governmental agencies in the country, as well as its commercial sector, will benefit from satellite’s services. In brief, they will all gather imagery, which can then provide insight into fields such as energy, agriculture, finances, maritime, disaster management, and cities infrastructure.

From a specifications standpoint, DS-SAR’s mass totals approximately 360 kg (~790 lb), and it will make use of solar arrays and batteries to ensure its power supply.
The SAR in DS-SAR
These three letters stand for Synthetic Aperture Radar, thus informing of the method the satellite will use to create images. Through it, the DS-SAR will obtain images of the surface of the Earth even through clouds, allowing for continued work in spite of weather factors or time of day. Such a performance is achieved using a large antenna, as can be seen in the pictures. Summing up, it works by using its own power to emit a signal, and measuring its echo to create images — exactly what everybody knows radars do.
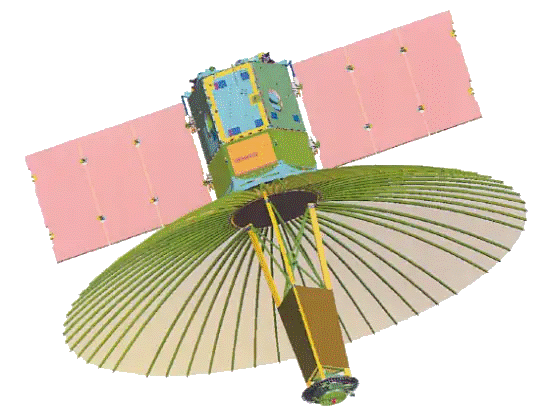
However, it is the synthetic aperture bit which makes this case different. Basically, the aperture of an antenna is its size — or some reference area or length, depending on the case. This “size” is important, because through it, combined with the wavelength of the signal, it is possible to determine the resolution of the instrument. So, the bigger it is, the higher the resolution, for a given wavelength. If the need for higher resolutions makes antennae too big to be practical, then there is a way to use a workaround: to move the antenna.
In this manner, the instrument emits the signal, which will then interact with the observed object, and bounce back. When the reflected wave returns to hit the antenna, this will have changed its position depending on its traveling speed. It is this distance that synthetically increases the aperture, as a result. In turn, this consequently provides the desired increase in resolution. After detecting this echo, some electronics post-processing is needed, in order to take advantage of the workaround. Additionally, other properties of the signal, such as polarization, provide further information to create the image.
Other Payloads Together With DS-SAR
There are six co-passengers on this flight, which will go to the same target orbit as the main payload.
VELOX-AM
Developed and operated by the Nanyang Technological University (NTU) from Singapore, this technology demonstration microsatellite is part of an undergraduate program. It masses at 23 kg (~50 lb), and will procure electrical power through solar arrays as well as batteries. By communicating with the ground, it will both receive control commands, and download data from onboard experiments. Additionally, it will leave its CW beacon open for radio amateurs to use it.
SCOOB-II
This is another satellite developed and operated by the NTU from Singapore. Similarly to the previous payload described, students get hands on this SCOOB-II project, second of a series. In this case, with an attitude control system, and an increased number of solar panels compared to SCOOB-I, it will be able to point at the Sun. Thus, it will generate enough to feed the customer payload. Being at 3U CubeSat, it masses at 4.1 kg (~9 lb), with approximate dimensions of 34x10x10 cm (~13x4x4 in) stowed, and features a lifetime between six months and one year.


ARCADE
Its name stands for Atmospheric Coupling and Dynamics Explorer, and it is also the fourth INSPIRESat. NTU is involved as main developer and operator of this 26.4 kg (~58 lb) microsatellite, which is part of the international consortium INSPIRE, also known as International Satellite Program in Research and Education. Measuring ~32x32x32cm (~13x13x13 in) stowed, it presents three deployable solar panels, as well as one fixed. All of them feed a couple of batteries, allowing for a service lifetime of one year, as a result. ARCADE hosts the following four payloads: a spatial heterodyne interferometer, a compact ionosphere probe, an atomic oxygen payload, and an earth imager.
ORB-12 STRIDER

Orbital Astronautics developed and also manufactured this 12U CubeSat massing 12.8 kg intended to serve as a test platform. Both the manufacturer and Aliena-Aurora — a satellite propulsion provider — have payloads on Strider. In the first place, the latter enterprise expects to assess an all-electric multi-modal attitude and orbit control system (AOCS). That is, a specific model of hall thruster will provide very effective low thrust propulsion. Conversely, a series of resistojets will enable higher thrust at the expense of efficiency. On the other hand, Orbital Astronautics will test a series of systems, such as: optical inter-satellite communications, synthetic aperture radar, an AI processing unit, thermal management, electric power, and an optical 1 m-resolution imager.
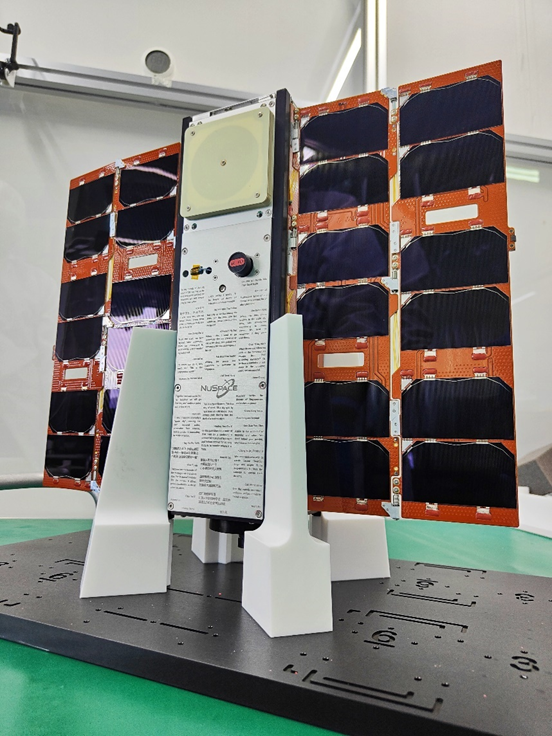
NuLIoN
NuSpace’s NuLIoN 3U CubeSat masses at 3.22 kg (~7 lb), and will enable customers to obtain data from remote sensors through the internet of things (IoT). That is, it will use low power communications to relay low volumes of data. This includes data points such as the temperature inside a refrigerated truck’s chamber, the GPS position of cattle animals, the optimization of street lighting, and so on. In brief, tiny bits of very specific information that are vital for the business in question. Additionally, NuLIoN carries a plate engraved with messages from the members of the public in Singapore.
Galassia-2
This is another 3U CubeSat, though coming from an educational background: the National University of Singapore. It was both developed and manufactured in that institution, and it masses at 3.84 kg (~8.5 lb). It features solar cells, as well as batteries in its electrical power system. Its mission will include Earth observation for monitoring, for example, agriculture and environmental change. In order to do this, a multi-spectral camera is used, sensing in green, red, red edge, and near infrared bands.
What Is The PSLV?
Originally conceived to launch into SSO, the Polar Satellite Launch Vehicle (PSLV) is, in short and according to ISRO, its workhorse. In essence, it is an expendable medium-lift launch vehicle developed and manufactured by the Indian agency. However, ISRO’s commercial arm, NewSpace India Limited (NSIL), has taken over this rocket’s production — at least partly — since 2019 in addition to providing launch services. Further, through NSIL the local industry and other institutions become a part of the process.
| Height [m (ft)] | 44.4 (~146) |
| Strap-on motors for variants CA, DL, QL, G/XL | 0, 2, 4, 6 |
| Liftoff mass(1) [kg (lb)] | 320,000 (~711,000) |
| Mass to LEO(2) [kg (lb)] | 3,800 (~8,400) |
| Mass to SSO(3) [kg (lb)] | 1,750 (~3,800) |
| Mass to sub-GTO(4) [kg (lb)] | 1,425 (~3,100) |
(2) 200 km (~120 mi).
(3) 600 km (~370 mi).
(4) 284×20,650 km (~176×12,800 mi).
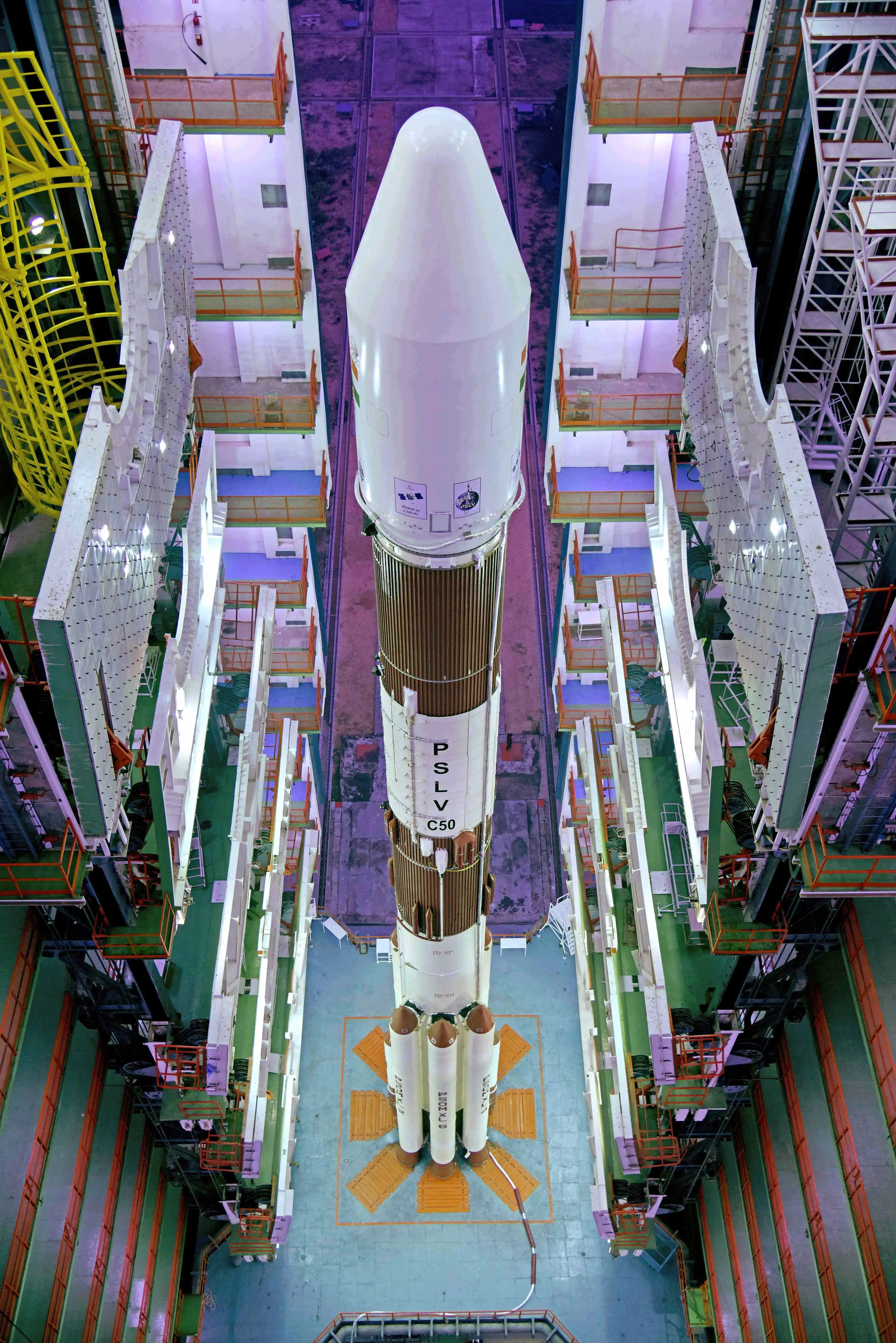
Following with its description, this launcher comprises four stages, alternating propulsion systems running on solid and on liquid propellants. When needed, strap-on solid rocket motors, or side boosters, increase the PSLV’s capabilities and give place to different variants of the launch vehicle. Presently, NSIL commercializes only two of them: the core alone (CA) variant, and the six extended side-booster (XL) variant. Others existed, and it is worth mentioning the one named G, also known as the generic variant, used six side-boosters, but smaller.
On the other hand, it is worth noting that the nomenclature PSLV-D# and PSLV-C## indicate the number of developmental and operational flights respectively.
Achievements And Notable Flights
PSLV’s first flight took place on September 20, 1993, though it ended up being a failure. After that, its track record became quite good, achieving high reliability. On a different note, this vehicle is capable of launching multiple satellites at once, and into different orbits. As a matter of fact, it set a record during the C37 flight on February 15, 2017, by orbiting 104 satellites (later on, SpaceX broke it with its Falcon 9 in the Transporter-1 mission).


To its credit, this rocket performed some notable launches, such as Chandrayaan-1 (a lunar probe) in 2008, the Mars Orbiter Mission in 2014, Astrosat (a space observatory) in 2015, and satellites for Navigation with Indian Constellation from 2013 to 2023.
In the next sections, all of the different propulsion stages (PS) are described in detail.
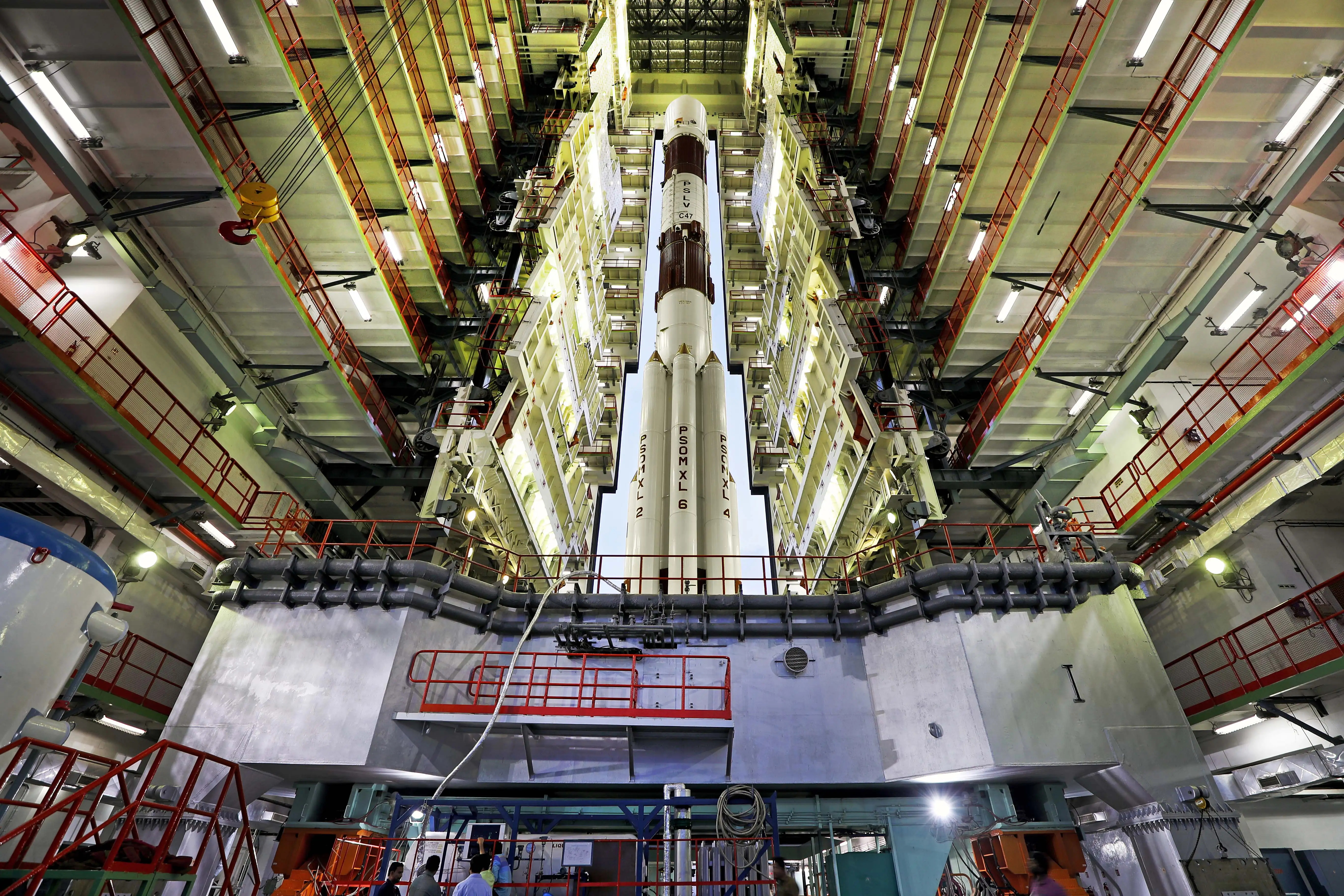
Side Boosters
Their structure is made of steel, and each of them is attached to the first stage through four points: two near the top, and two near the bottom. Instead of using auxiliary rocket motors, they complete their separation by means of spring pushers. In the XL variant, not all of the six side boosters are lit on the ground, but four of them are, with the remaining two igniting mid-flight. Finally, they are denominated PSOM XL (propulsive strap-on motor extended length, presumably), and their nozzles are of the fixed type. Two of them make use of a SITVC system analogous to the one described for the PS1, for roll control augmentation.
| Length [m (ft)] | 12 (~39) |
| Diameter [m (ft)] | 1 (~3) |
| Motor | 1x S12 |
| Propellant | Solid: HTPB(1)-bound Al(2) oxide, and AP(3) |
| Propellant mass [kg (lb)] | 12,200 (~27,000) |
| Max. thrust [kN (lbf)] | 790 (~178,000) |
(1) Hydroxyl-terminated polybutadiene
(2) Aluminum
(3) Ammonium perchlorate

PS1 — First Stage
The first stage of the PSLV rocket is, in brief, a very large solid propellant motor made of a steel structure. Given that the nozzle in its lowest part is not-gimballing, the stage needs another control system. A Secondary Injection Thrust Vector Control (SITVC) system creates differential forces basically by injecting a liquid through the nozzle’s walls. As a result, one side of the nozzle generates higher thrust than the other, allowing the launcher to pitch and yaw. In order to roll, the launch vehicle fires control engines located under the SITVC tanks, in opposite places around the fuselage.

| Length [m (ft)] | 20 (~66) |
| Diameter [m (ft)] | 2.8 (~9) |
| Motor | 1x S139 |
| Propellant | Solid: HTPB-bound Al oxide, and AP |
| Propellant mass [kg (lb)] | 139,000 (~306,000) |
| Max. thrust [kN (lbf)] | 4,800 (~1,080,000) |
An interstage is bolted to the top of the first stage, leaving enough room for the second stage’s nozzle, but also housing retro-rockets motors. These are four pairs of solid motors used only when stage separation happens, ensuring stage 1 takes distance from stage 2.
PS2 — Second Stage
Made of aluminum alloy, the second stage’s (also designated PL40) fuselage doubles up both as propellant tanks with a common bulkhead delimiting them, and as structure. Painted in deep Indian red, the PS2 presents another two interstages connecting to the contiguous stages. The lower one houses a single pump-fed Vikas engine, while allowing to externally mount a series of motors. Specifically, these are four retro-rockets — for staging 2-3 — and four ullage rockets — after staging 1-2, for propellant settling.
| Length [m (ft)] | 12.8 (~42) |
| Diameter [m (ft)] | 2.8 (~9) |
| Engine | 1x Vikas |
| Propellant | UH25 + N2O4 |
| Propellant mass [kg (lb)] | 42,000 (~93,000) |
| Max. thrust [kN (lbf)] | 799 (~180,000) |
Particularly, the main engine of this stage is derived from the French Viking engines, and works under a gas generator cycle. It uses hypergolic propellants, and its ability to gimbal around two axes grants the PS2 both pitch and yaw control. A separate roll control system uses hot gas bled from the gas generator for this purpose.

Water from a toroidal tank refrigerates the gasses coming out of the gas generator and before entering the turbopumps. Gaseous helium pressurizes both propellant and water tanks
HPS3 — Third Stage
| Length [m (ft)] | 3.6 (~12) |
| Diameter [m (ft)] | 2 (~7) |
| Propellant mass [kg (lb)] | 7,650 (~16,900) |
| Motor | S7 |
| Propellant | Solid: HTPB-bound Al oxide, and AP |
| Max. thrust [kN (lbf)] | 240 (~54,000) |
With the “H” meaning high performance, stage no. 3 runs on solid propellants, similarly to the PS1. Conversely, the casing of this stage’s motor is not also its fuselage, but the former — made in a composite material using kevlar fibers — is placed inside the latter. More precisely, it is in fact an interstage connecting the upper interstage on the second stage to the fourth stage. A black, conical structure links stages three and four, as can be seen in a picture below.
A flex, gimballing nozzle — providing pitch and yaw control (±2° of each) — remains equally hidden inside the mentioned interstage, and discharges the combustion products generated in the solid motor. It performs with increased efficiency owing to the carefully contoured, slight bell shape of its design.
Unlike the other stages, this one makes use of the reaction control system (RCS) present in the fourth stage to achieve roll control. Moreover, this RCS also becomes active for control in coast phases.


PS4 — Fourth Stage
A ring usually painted white, enables stage four to sit on top of the rest of the rocket. A pair of engines running on hypergolic propellants serve as the main propulsion source for this stage, as well as give complete control. In this case, gimballing them ±3° provides pitch, yaw, and roll for this stage. The PS4 is where the equipment bay (EB) is installed, i.e. around the propellant tanks — the metallic cylinder in the center. Two packs presenting three thrusters each are located on opposite sides of the mentioned white ring, allowing for control during coast phases (also for stage three). Furthermore, antennae located there make it possible for the vehicle to communicate with the ground to monitor vehicle and payload health, and flight status. To this end, telemetry is transmitted on S-band, and transponder signal on C-band.

| Length [m (ft)] | 3 (~10) |
| Diameter [m (ft)] | 1.34 (~4.4) |
| Engine | 2x |
| Propellant | MMH(1) + MON3(2) |
| Propellant mass [kg (lb)] | 2,500 (~3,500) |
| Max. thrust [kN (lbf)] | 14.6 (~3,300) |
(1) Mono-methyl hydrazine, fuel.
(2) Mixed Oxides of Nitrogen, oxidiser.
A circularly shaped shelf-like structure is the aforementioned EB, where the brains of the rocket certainly reside. That is, the inertial navigation system (INS), telemetry electronics, safety systems, and other equipment boxes. Additionally, secondary payloads can be deployed from here.
Another very important feature of the PS4 is its reigniting capability, which lets the launcher place payloads into different orbits. After the end of the mission, the stage vents all pressurized fluids to become passivated, minimizing the risk of a break-up, and consequently avoiding to generate space debris.

PS4 As Orbital Platform
In addition to all of this, the fourth stage of the PSLV is capable of working as an orbital platform (OP). Flights C37, C38, and C44 saw trials of this option, while C45 added an independent power source — a fixed solar array on the tank. Finally, on flight C53 it took the official denomination of orbital platform experiment module (POEM).
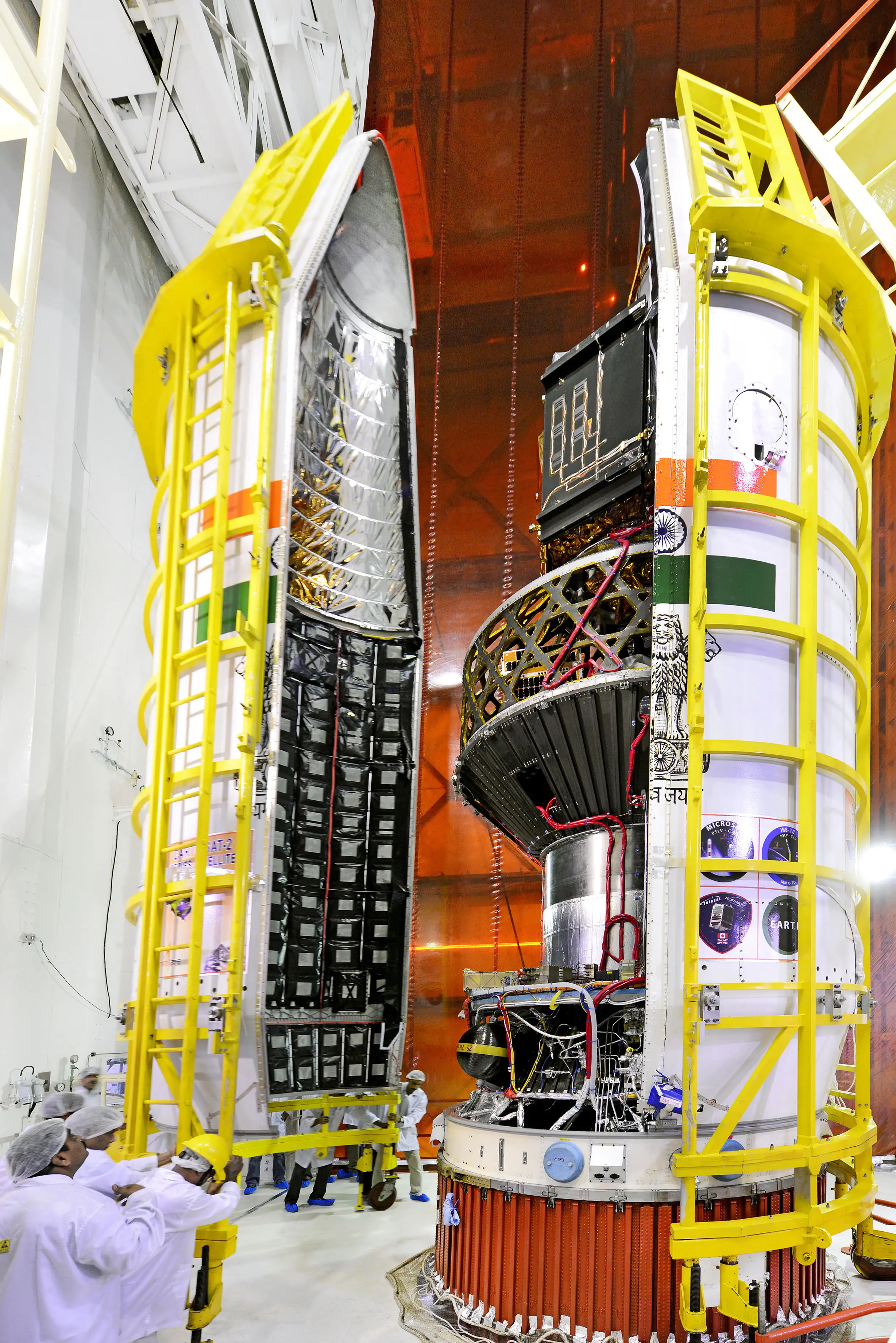
Payload Fairing
Also referred to as “heat shield,” the payload fairing allows the launcher to carry multiple payloads in tandem using the Dual Launch Adapter (DAL), or other adapters for smaller satellites. It consists of two halves made of aluminum, with the cylindrical segment machined in order to obtain isogrid construction. These halves use a pyrotechnical system in order to separate from each other, and from the fourth stage. Acoustic blankets are sometimes present inside the fairing for the purpose of protecting the payload from vibrations of that nature, especially at liftoff.
| Length [m (ft)] | 8.3 (~27) |
| Max. diameter [m (ft)] | 3.2 (~10) |
| Mass [kg (lb)] | 1,182 (~2,600) |
DS-SAR Mission Timeline
The following values are approximate and may vary.
| Event | Time [s] | Local Altitude [km] | Local Altitude [mi] | Inertial Velocity [m/s] | Inertial Velocity [ft/s] |
| PS1 RCT Ignition | -3.0 | 0.0 | 0.0 | 451.9 | 1482.6 |
| PS1 Ignition | 0.0 | 0.0 | 0.0 | 451.9 | 1482.6 |
| PS1 Separation | 110.5 | 50.0 | 31.1 | 1724.1 | 5656.5 |
| PS2 Ignition | 110.7 | 50.2 | 31.2 | 1723.2 | 5653.5 |
| CLG Initiation | 115.7 | 54.9 | 34.1 | 1743.0 | 5718.5 |
| PLF Separation | 185.6 | 113.1 | 70.3 | 2606.8 | 8552.5 |
| PS2 Separation | 263.0 | 164.1 | 102.0 | 4695.0 | 15403.5 |
| PS3 Ignition | 264.2 | 164.8 | 102.4 | 4693.7 | 15399.3 |
| PS3 Burn Out | 390.9 | 216.8 | 134.7 | 7693.0 | 25239.5 |
| PS3 Separation | 590.9 | 325.2 | 202.1 | 7568.4 | 24830.7 |
| PS4 Ignition | 951.4 | 480.3 | 298.5 | 7388.2 | 24239.5 |
| PS4 Cut-off (RTD-T6) | 1224.4 | 536.1 | 333.2 | 7590.8 | 24904.2 |
| DS-SAR Separation | 1271.4 | 536.1 | 333.2 | 7592.7 | 24910.4 |
| NuLIoN Separation | 1281.4 | 536.1 | 333.2 | 7592.7 | 24910.4 |
| ORB-12 STRIDER Separation | 1326.4 | 536.0 | 333.1 | 7592.8 | 24910.8 |
| Galassia-2 Separation | 1340.4 | 536.0 | 333.1 | 7592.8 | 24910.8 |
| SCOOB-II Separation | 1381.4 | 535.9 | 333.1 | 7592.9 | 24911.1 |
| ARCADE Separation | 1431.4 | 535.8 | 333.0 | 7593.0 | 24911.4 |
| VELOX-AM Separation | 1486.4 | 535.7 | 332.9 | 7593.2 | 24912.1 |